

High Performance 8W Small Magnetic Particle Brake
High Performance 8W Small Magnetic Particle Brake
SKU:SMA-bbd97b
Achieve precise torque control with the High Performance 8W Small Magnetic Particle Brake. Ideal for tension control and load simulation.
Regular price
$249.99
Regular price
Sale price
$249.99
Unit price
per
Initiate Order

High Performance 8W Small Magnetic Particle Brake
$249.99
Quantity: 1
Claim Your Seller Account
High Performance 8W Small Magnetic Particle Brake
$249.99
Quantity: 1
Delivery via Maden
Expect your order to arrive on time.
Secure Payments
All orders are processed through a secure, PCI-compliant checkout.
Experience precise torque control with the High Performance 8W Small Magnetic Particle Brake. This self-contained brake offers smooth and repeatable torque, ideal for tension control, load simulation, and soft stops. With a torque range of 1.2 to 40 oz-in and a maximum speed of 2500 rpm, this brake provides reliable performance for various applications. Engineered for efficiency and durability, it ensures consistent operation under diverse conditions.
Ready to Grow Without Cash Flow Constraints?



Product Specifications
Characteristics Characteristics
With no electrical excitation, the shaft freely rotates.With electrical excitation, the shaft becomes coupled to the case.While the load torque is less than the output torque, the shaft wonât rotate.When the load torque is increased, the brake will slip smoothly at the torque level set by the coil input current.
Determining Proper Brake Size Determining Proper Brake Size
Determining Proper Brake SizeThe proper sized brake mustâ¦Have sufficient torqueBe able to dissipate the heatNo run above rated speedTorqueFor load simulation, torque limiting and similar applications, torque is already known.For web handling, torque must be calculated. First determine the desired tension in your web (wire, fabric, film etc.).Calculate Torque: Torque (lb-inches) = Tension (lbs) x Roll Diameter (inches) x 0.5Use the Full Roll Diameter for calculating the maximum torque needed. For applications with the web running over a pulley or between nip rollers (pinch rollers), use the pulley diameter as the roll diameter in the formula above. Always be conservative - select the next larger model if the application requires nearly the rated torqueRPM (must be less than the maximum allowable)For load simulation, torque limiting and similar applications, RPM is already known.For web handling, usually linear speed (Web Speed) is known, and RPM must be calculated.Calculate RPM: RPM = 3.8 x WEB SPEED (feet per minute)/ROLL DIAMETER (inches)Use the Full Roll Diameter to determine the slowest speed. Use the Core Diameter (empty spool diameter), to determine the fastest speed. For applications with the web running over a pulley or between nip rollers (pinch rollers), use the pulley diameter as the roll diameter.Slip Heat Dissipation (model must be physically large enough not to overheat)For any application.Calculate Heat Input: HEAT (watts) = TORQUE (lb-inches) x RPM x 0.012For unwinding applications.Calculate Heat Input: HEAT (watts) = WEB TENSION (lbs) x WEB SPEED (feet/minute)/44Duty CycleThe average heat input must be below the brake's heat dissipation rating. If the motion is intermittent, use the average speed for thermal (SLIP) calculations.
Note Note
Mounting holes - Standard: Imperial (inch), Optional: Metric
Specifications Available Direct Current Dc Coil Voltage
6 V | 12 V | 24 V | 90 V
Specifications Configuration
Shaft on one or two sides
Specifications Maximum Overhung
5 lb | 22 N
Specifications Maximum Speed
2500 rpm
Specifications Slip Heat Dissipation
8 W
Specifications Torque Range
1.2 to 40 oz·in | 0.85 to 28 N·cm
Specifications Weight
1 lb | 0.45 kg
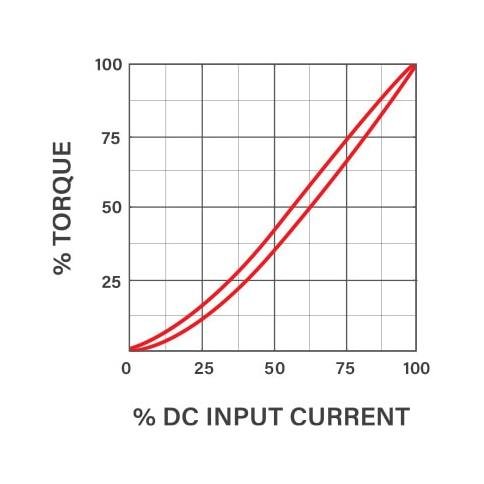
Torque Torque
Is proportional to input current.Is independent of RPM.
Applications Applications
Adjustable Tension - For Unwinding (Payout) Webs.Load Simulation - For Testing Stepper Motors, Gear Motors and MechanismsTorque LimitingSoft Stops